
Tworzymy symulacje kinematyczne i programy offline (OLP) stacji zrobotyzowanych, korzystając z odpowiedniego oprogramowania 3D. Bierzemy udział w projektach od etapu tworzenia koncepcji budowy stacji, po wygenerowanie programów robotów. Przygotowujemy wirtualne rozruchy systemów automatyki przemysłowej w zakresie robotyzacji, sterowania i systemów wizualizacji.
WIRTUALNY ROZRUCH / SYMULACJA
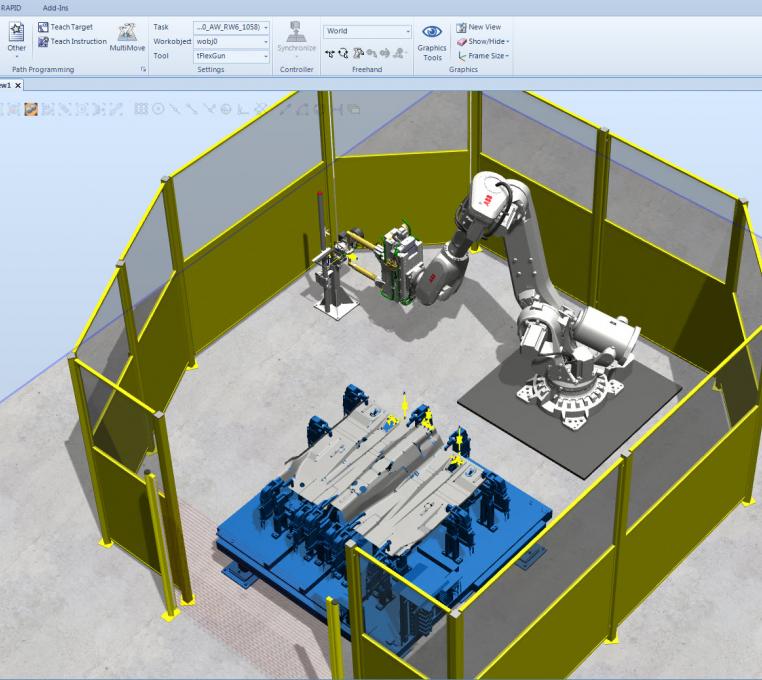
Podczas realizacji projektów łączymy świat wirtualny z rzeczywistym, wykorzystując oprogramowanie Process Simulate, Delmia V5 oraz Robcad. Dodatkowo posiadamy kontrolery RCS dla robotów wielu producentów, które zapewniają wysoką dokładność odwzorowania w tworzonych ścieżkach i pozwalają nam na ich wczesną optymalizację.
Mamy doświadczenie z różnymi standardami symulacji i programowania. Podczas kolejnych etapów prac zajmujemy się tworzeniem wstępnych konceptów stacji, doborem narzędzi, weryfikacją procesów, tworzeniem i optymalizacją ruchów robotów, wraz z przygotowaniem końcowych programów zgodnie z wymogami klienta. Na wszystkich tych etapach ściśle współpracujemy z działami konstrukcyjnymi, aby wyeliminować jak najwięcej błędów na wczesnym etapie projektowania.
Zajmujemy się wirtualnymi rozruchami linii produkcyjnych (Virtual Commisioning), mającymi na celu usprawnienie i skrócenie czasu pracy związanego z wdrożeniem na obiekcie. Do wizualizacji działania linii produkcyjnych wykorzystujemy oprogramowanie SGView oraz RF::YAMS. Pracujemy w środowisku WinMOD i RF::ViPer. Prowadzimy intensywne prace badawcze nad możliwością użycia WinMOD’a do symulacji obiektów ciągłych.
